Abstract
Humanoid and legged robots interact with the environment through intermittent contacts, making accurate motion estimation fundamentally dependent on reasoning about contact dynamics. However, standard sensing pipelines—whether based on onboard proprioception with Extended Kalman Filters (EKFs) or external motion capture systems—recover only kinematics, while contact forces, contact timing, and inertial parameters remain unobserved. As a result, purely kinematic reconstructions often violate rigid-body dynamics, particularly during contact-rich motions.
To enable accurate motion estimation from onboard kinematics in real-world deployment, we propose PRIME (Physically-consistent Robotic Inertial and Motion Estimation), a Maximum A Posteriori formulation that refines measured kinematics and actuator commands into a dynamically consistent trajectory while jointly estimating frictional contact forces and physically consistent inertial parameters. Our approach incorporates differentiable contact dynamics with smoothed complementarity constraints and an Anitescu-style friction model, yielding a smooth optimization problem that remains stable across contact transitions.
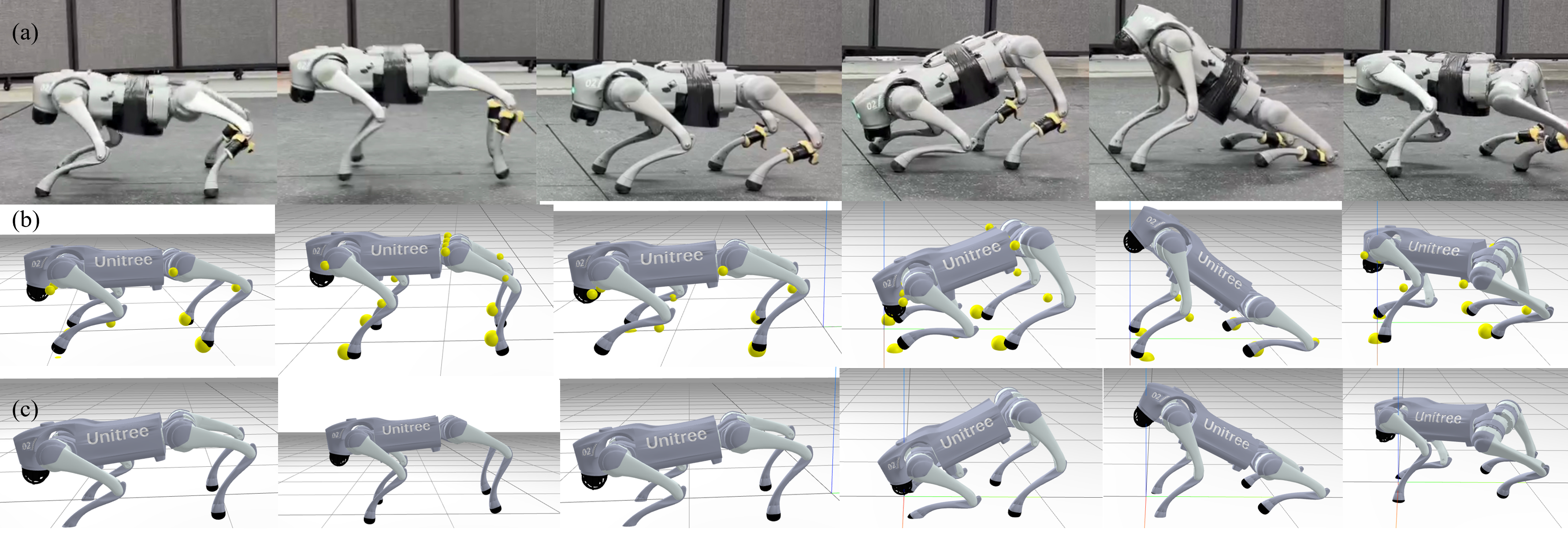
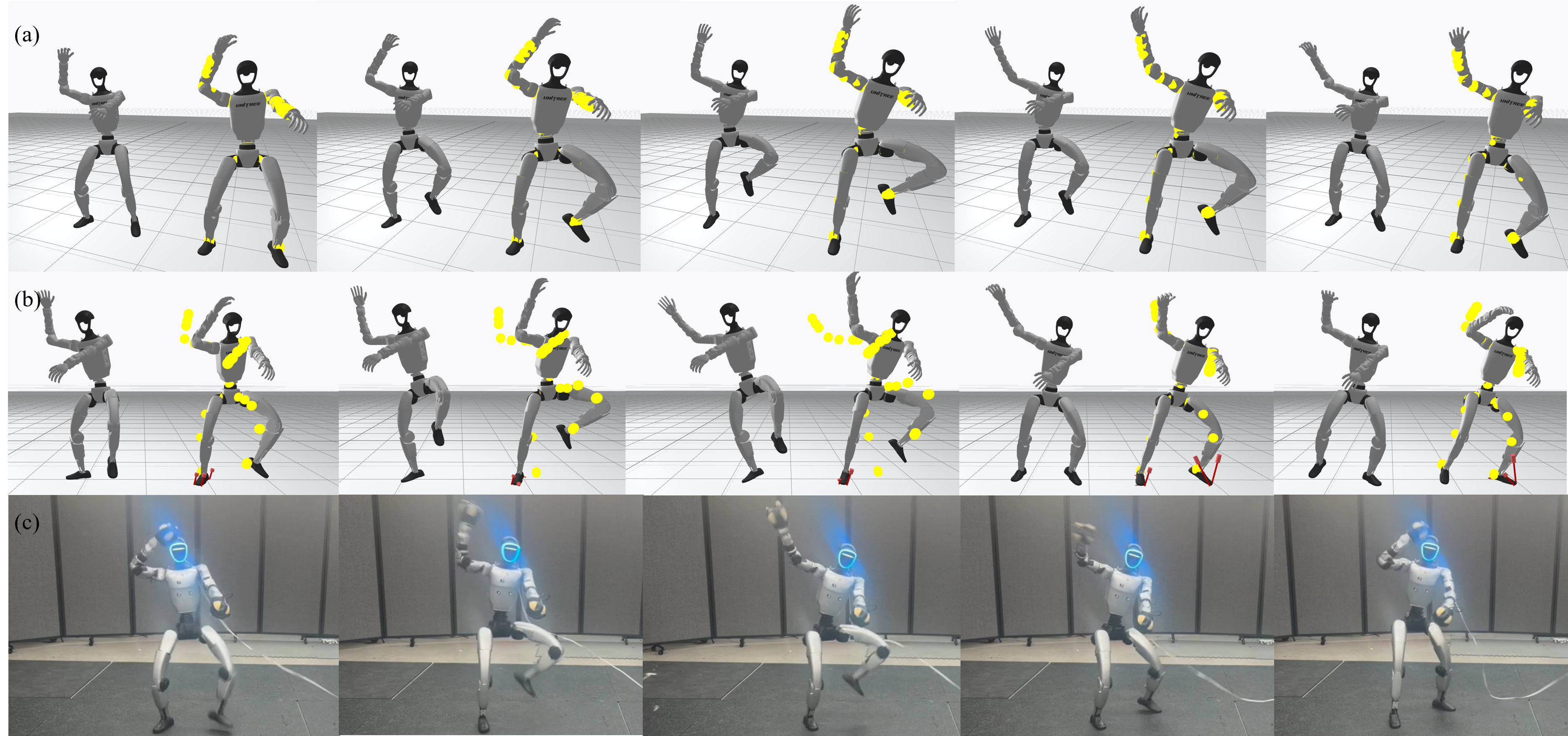
We evaluate PRIME on contact-rich locomotion with quadrupedal robots and the Unitree G1 humanoid, demonstrating improved trajectory consistency and accurate inertial parameter identification. Beyond improving model-based estimation and control with calibrated inertial parameters, PRIME produces force- and contact-annotated motion reconstructions from real robots in deployment, which can be used to provide high-quality data for downstream learning applications, including large-scale behavior modeling and robot foundation models.

Framework Overview
PRIME uses differentiable contact dynamics within a Maximum A Posteriori framework to jointly estimate physics-consistent motion trajectories, inertial parameters, and contact from real robot data.